
This both is an Error is PreArm error of the Mission planner. This error showing means you are using an APM or pixhawk flight controller.
Errors:
-
PreArm: Need 3D Fix
-
PreArm: High GPS HDOP
Why this error is shown in the mission planner?
Both errors are related to the GPS. When GPS has not 3D fixed at that time you will face this error and when the GPS HDOP value is more than 2 at that time you will receive this error. if you are looking good quality GPS module then the drone will take less time to connect with GPS and your drone will quickly be ready to arm.
Note: this both errors you will face if you are using Loiter mode or flight mode which required GPS.
Many times people face this issue even if they are not using Loiter mode but they are facing the same error. It happens due to the GEO fence. You need to Disable Geofence.
What is Geo-fence:
Geo fence helps you to control your drone to fly in a specific area if the drone will go outside of provided area then Geo-Fence will be on and the Drone mode will automatically change to the RTL and then after it will automatically land at the takeoff location.
You will get more details about Geo-fence here. https://ardupilot.org/copter/docs/common-ac2_simple_geofence.html
How to disable Geo-fence?
Go to Config/tuning → GeoFence → ( Uncheck Enabled).
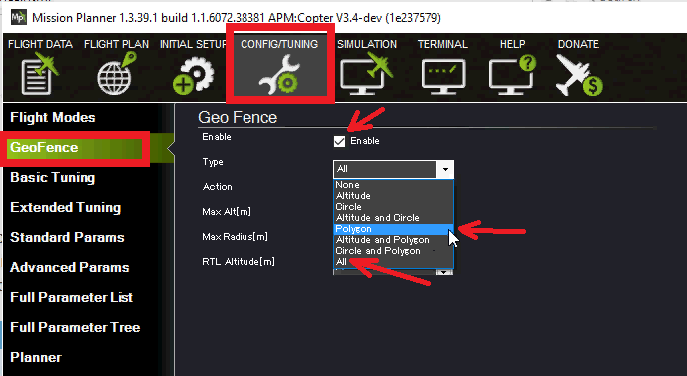
You can also Edit Geofence data like type, Action, Alt, Radius.
If you have any questions related to the drone please leave a comment below.



Leave a Comment