10 Feb

Hello,
In this article, we are going to learn about ESC and how to select the right ESC for your quadcopter.
In this article, we are going to learn about ESC and how to select the right ESC for your quadcopter.
ESC or Electronic speed controller is one of the main components in the power delivery system for a drone. It acts as a bridge between the flight controller and the movement of the motor. It controls the speed of the motors in a drone. A good ESC ensures a smooth flight as it controls all the motors properly. Although there are a number of factors which are considered before choosing an ESC.
- Current Rating
- Input Voltage rating
- Weight and Size
- ESC Firmware
- BEC
- Connection of ESC
- ESC processors
- ESC protocols
Current Rating
Motors draw current when they rotate. If the motors draw current which is greater than the limit of the ESC then the ESC will overheat and will eventually damage. Three things can increase the current draw of an ESC. They are:
- High KV ratings of a motor
- Larger sized propellers
- Larger sized motors
There are two types of current ratings when it comes to an ESC: continuous and burst. The continuous rating means the amount of current an ESC can sustain for a long time without overheating or getting damaged. The burst rating is the amount of current it can handle for a short period of time without overheating or getting damaged.
Input Voltage Rating
The voltage rating of an ESC is the maximum amount of voltage an ESC can handle without damaging itself. It differs from ESC to ESC how much voltage they can handle. Some ESCs can handle 3S-4S battery voltage whereas other ESCs can handle upto 6S battery voltages.
Weight and Size
The weight and size of an ESC are mostly dependent on its current rating. It is difficult to make ESCs more lighter and smaller while increasing their performance and cooling systems. Single ESCs weigh in the range of 4 to 6 grams and 4 in 1 ESCs weigh around 12 to 15 grams. Lighter ESCs have less effective cooling systems which means it will have more overheating issues.
ESC Firmware
ESC firmware is the software on which an ESC runs. It enhances the performance of the ESCs. ESC firmware integrates all the hardware and it gives information about the supported protocols and the different configurations. There are many different ESC firmware out there. Some of them are:
- BLHeli ESC
- BLHeli_S ESC
- SimonK ESC
- KISS firmware
- BLHeli_32
BEC
The full form of BEC is Battery elimination circuit. The BEC outputs constant current at a specific voltage. It give 5V output for powering the flight controller. Nowadays BECs are not required as a power distribution board is used.
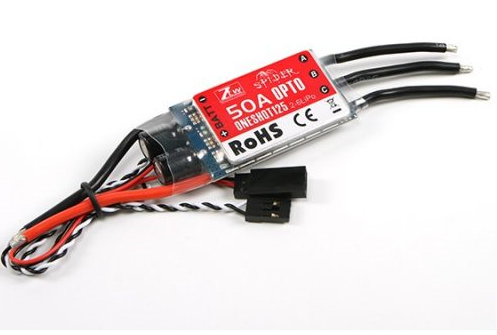
And ESC without a BEC is called an opto ESC. Without the BEC, the flight controller and receiver will require separate power supply. As we can see in the above picture, there is no red wire in the ESC. There is only signal and ground wire.
Connection of ESC
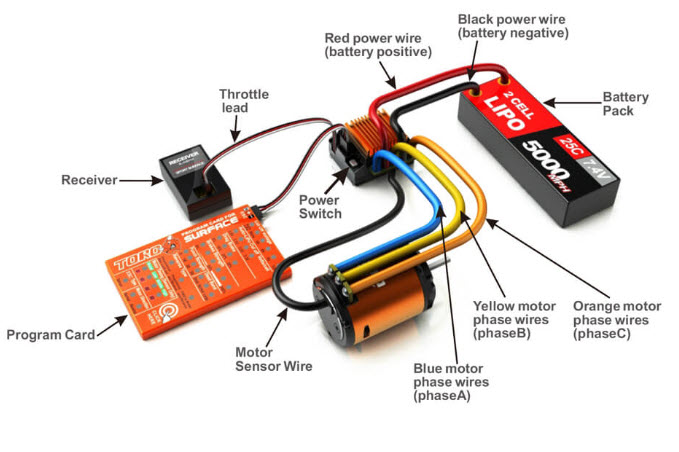
ESC uses a Lipo battery to power up. The ESC receives the signal from the flight controller. The ESC is connected to the brushless DC motor via 3 wires: Power supply, ground and signal pin. The below image shows an ESC, a lipo battery, a receiver and a brushless DC motor.
ESC protocols
Protocols are a vital part on the essential in the software side of the drone. They ensure proper communication between ESC and the FC which in turn ensures proper flight of the quadcopter. Below is a list of some protocols from oldest to latest.
- Standard PWM
- Oneshot125
- Oneshot42
- Multishot
- DShot
- ProShot
ESC processors
Almost all ESCs use processors manufactured by Atmel, Silabs and ARM Cortex. Each has different features, specifications, performances and support different firmware.
- Atmel 8-bit is compatible with both SimonK and BLHeli firmware.
- SILABS 8-bit is compatible with BLHeli and BLHeli_S only.
- ARM cortex 32-bit can run with BLHeli_3.
I hope you learned something about ESCs and their working specifications in this article and I hope you liked it.

Leave a Comment