-1060x400h.webp "Spider Robot using Arduino")
Hello,
In this tutorial, we are going to learn how to make a spider robot with four legs (quadruped).
-
Spider robot, as the name suggests is a robot with a spider-like body movement using four legs. It can also be named a quadruped robot because of its number of legs.
-
These come in the category of legged robots. Legged robots are generally more complicated than wheeled robots as wheeled robots only have one degree of freedom whereas a legged robot has a more complex motion.
-
Legged robots move through rough terrain much more comfortably than wheeled robots. Legged robots are more costly than wheeled robots as they generally use more motors and of different kind. Wheeled robots usually have DC motors whereas legged robots generally have servo motors.
Hardware Required
Software Required
Mechanism of a quadruped spider robot
-
Degrees of freedom (DOF) of a body are defined by the number of parameters it takes to define the position of that same body.
-
A quadruped spider robot has 3 servo motors in each of its legs to give out 3 different directions of motion. This means that the degree of freedom (DOF) for one leg is 3. So the total degrees of freedom (DOF) of a quadruped spider robot is 12.
-
This project might not be very complex in terms of the wiring and the assembly, but it is incredibly complex to understand the kinematics behind the motion of the quadruped robot. It requires a good rudimentary knowledge of physics. But we will try to explain it in a way where everyone can understand.
-
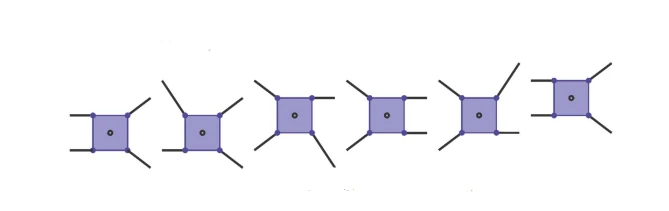
To make a controlled movement, the robot has to perform a different number of poses which all make one move. Generally, to move one step the robot goes through 5 different poses as shown below.
-
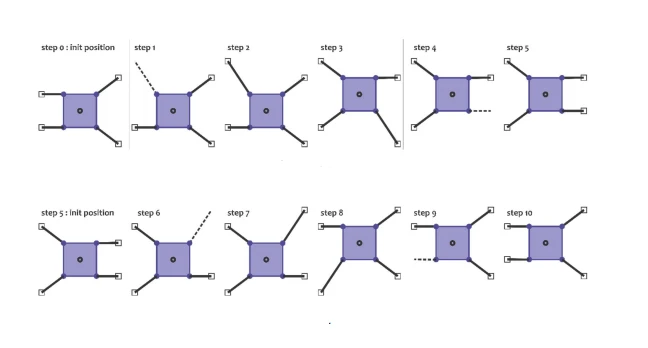
To go into more detail, the step-by-step motion is explained in the figure below. The dotted line shows that the foot has been lifted. The figure explains the first half of the motion and the second half of the motion separately.
-
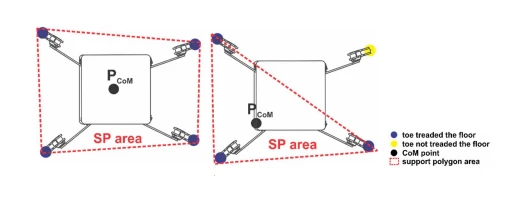
For the balance of the robot, the center of mass of the whole robot must stay inside the support polygon. Support polygon is the imaginary polygon, inside which if the center of mass is there then the robot can stay balanced. As soon as the center of mass falls outside the support polygon. The robot trips. The said concept is explained in the figure below. As long as the COM is inside the support polygon the robot is in the balanced condition.
Chassis for the quadruped robot
-
There are many different designs available for chassis for the quadruped robot. Any one of those could be 3D printed and used for this project
-
We found this particular design here. We 3D printed this chassis shown below.


Circuit Diagram
-
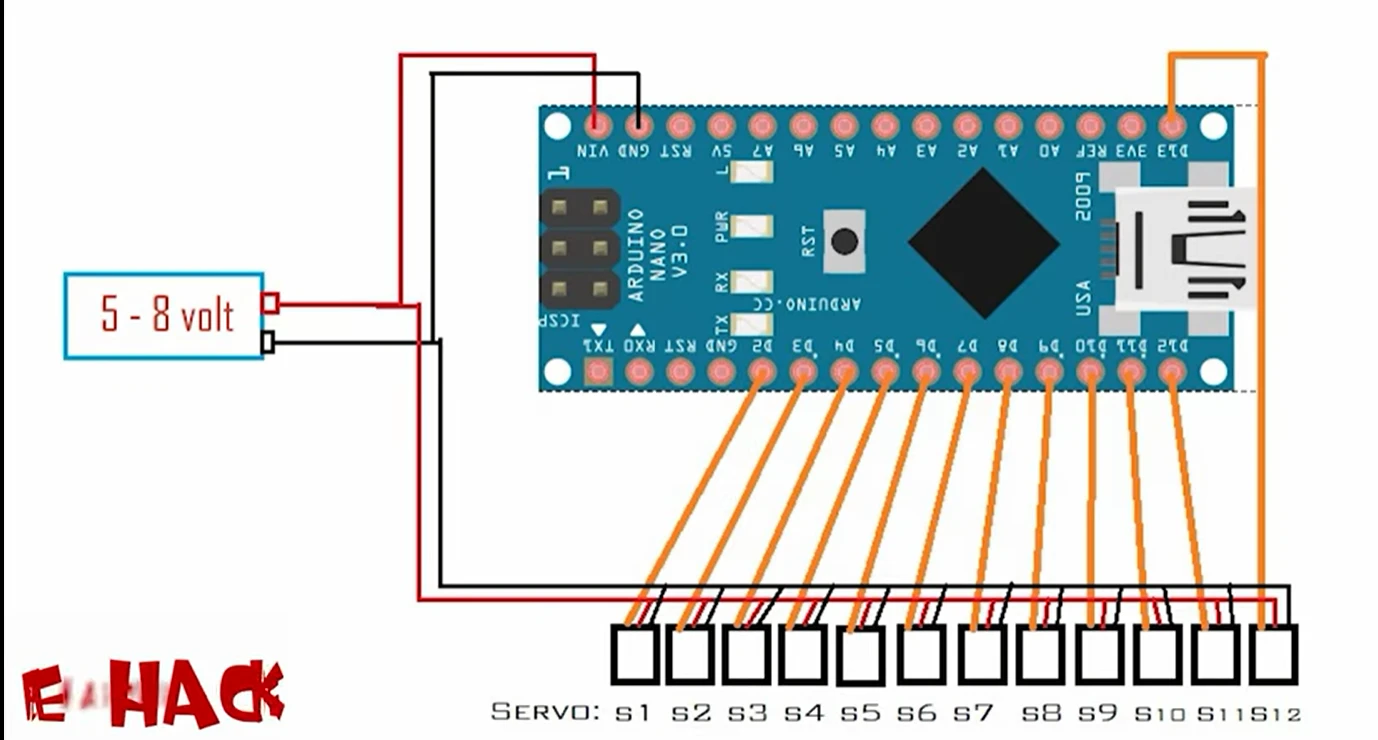
The circuit diagram for the spider robot is very easy to understand. But to perform this diagram is a very meticulous process.
-
This is because we have to connect 12 different servos to a rather small Arduino Nano.
-
Also, we have to connect 12 Servo motors in parallel for both positive and negative terminals.
Arduino Code
-
The Arduino code for this project can be downloaded here along with the libraries required.
-
Note: This spider robot is not remote-controlled. So for different actions, there are different codes. And to change an action, you will have to upload the code again.
-
Download all the codes and libraries. Install the required libraries.
-
Upload the code for whatever function you want the spider robot to perform.
Now your Spider robot is ready! Enjoy!



Leave a Comment