

-34 %


360° - TowerPro MG995 Plastic Gear Servo Motor
₹297
₹449
(inc GST)





 Metallic Mechanical robotic Gripper/clamp - Flyrobo.in")




")
How to check Servo motor is working or not?
-
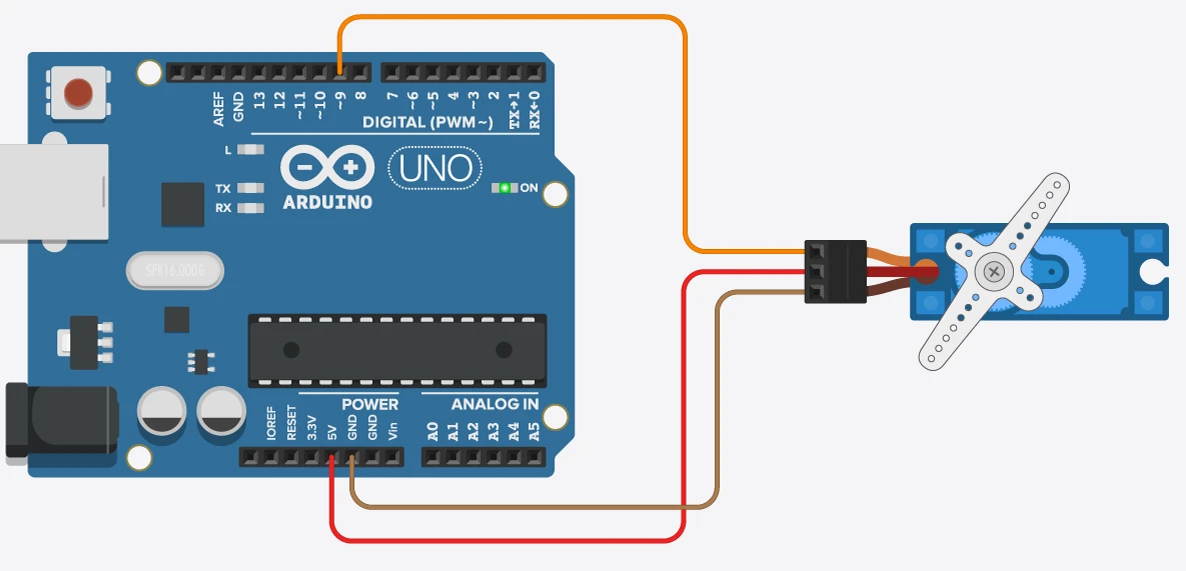
#include
Servo myservo; // create servo object to control a servo // twelve servo objects can be created on most boards int pos = 0; // variable to store the servo position void setup() { myservo.attach(9); // attaches the servo on pin 9 to the servo object } void loop() { for (pos = 0; pos <= 180; pos += 1) { // goes from 0 degrees to 180 degrees // in steps of 1 degree myservo.write(pos); // tell servo to go to position in variable 'pos' delay(15); // waits 15 ms for the servo to reach the position } for (pos = 180; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees myservo.write(pos); // tell servo to go to position in variable 'pos' delay(15); // waits 15 ms for the servo to reach the position } } [ 16/12/2021 ]Was this answer helpful?
Can i get GST invoice for the order ?
-
Yes, You can claim GST credit if you have a GST number. To do it you have to mention the GST number at the time of checkout. GST option appears in the Billing Address. If you are an existing customer of flyrobo then you can log in to your account ( Account → Address Book → Edit Address) and Then enter your GST number.[ 16/11/2022 ]Was this answer helpful?
When will delivered order?
-
Order will be delivered within 1-3 days in metro city, 3-5 days in other city and 4-7 days in villages or small city. This is the average time of delivery in express shipping. but can change with different locations and different situations.[ 16/07/2021 ]Was this answer helpful?
Showing 1 to 3 of 3 (1 pages)






